
")

 Ziel dieses Vorhabens ist es, Verfahren zu entwickeln, die aus mehreren Ansichten einerseits
Ziel dieses Vorhabens ist es, Verfahren zu entwickeln, die aus mehreren Ansichten einerseits
stabilere Analyseergebnisse liefern und andererseits die durch die Aufnahmegeometrie gegebenen
Schwächen beseitigen. Zusätzlich sind Algorithmen zu entwickeln, die aus den Ansichten 3DInformationen
ableiten und diese mit Ergebnissen aus interferometrischen 3D-Bestimmungen
vergleichen.
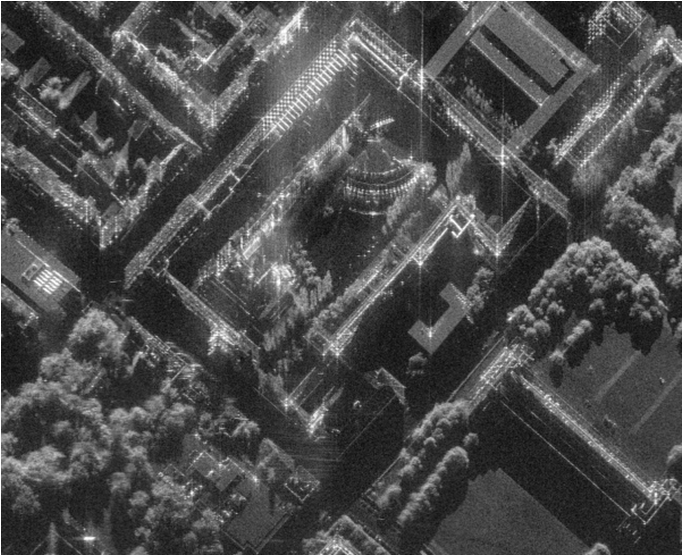
Abbildende Radarsysteme mit synthetischer Apertur (SAR) erlauben gegenüber passiven Systemen
im sichtbaren Spektralbereich eine Beobachtung der Erdoberfläche zu jeder Tages- und
Nachtzeit und dies wetterunabhängig. Monostatisches SAR setzt prinzipiell eine schräge Beleuchtung
einer ebenen Szene voraus. Dadurch treten bei erhabenen Objekten abhängig vom Beobachtungswinkel
unerwünschte Verdeckungen und Signalüberlagerungen auf. Diese Problematik
trifft besonders für Gebäude in dichten urbanen Gebieten auf, die durch hoch aufgelöste SARBilder
aufgenommen werden. Nimmt man SAR-Bilder aus verschieden Richtungen auf, so können
redundante Informationen zur Steigerung der Zuverlässigkeit bei der Objektextraktion beitragen
und nichtredundante Informationen zu einer Vervollständigung der Szenenbeschreibung führen.
Ziel dieses Vorhabens ist es, Verfahren zu entwickeln, die aus mehreren Ansichten einerseits
stabilere Analyseergebnisse liefern und andererseits die durch die Aufnahmegeometrie gegebenen
Schwächen beseitigen. Zusätzlich sind Algorithmen zu entwickeln, die aus den Ansichten 3DInformationen
ableiten und diese mit Ergebnissen aus interferometrischen 3D-Bestimmungen
vergleichen.